multistatic rfid tracking Passive Unsupervised Localization and Tracking using a Multi-Static UWB Radar Network . Fongwah Dual Interface IC Card Reader Writer S9 supports dual interface IC cards including contactless and contact IC cards or supports to read/ write individual RF card and contact smart card. Multiple card slots is suitable for .
0 · [2306.07740] Multi
1 · Passive Unsupervised Localization and Tracking using a
Hi folks. I have been cloning a lot of mifare classic card with the traditional UID Gen1A writable cards. Recently I have ordered a bunch of CUID Gen2 card with the Magic features. Most of the shop comes with and .
Passive Unsupervised Localization and Tracking using a Multi-Static UWB Radar Network . The proposed algorithms to fuse information by multiple nodes show significant .
Passive Unsupervised Localization and Tracking using a Multi-Static UWB Radar Network Abstract: The indoor localization and tracking of objects and humans with high accuracy is becoming increasingly important in a number of applications including healthcare, ambient assistant-living, surveillance, among others. The proposed algorithms to fuse information by multiple nodes show significant gains in terms of targets' localization performance, with up to 35\% for the probability of detection, compared to the baseline with a mono-static setup. 8 pages, 10 figures, 1 table.1. Divide tag response with samples captured during cw. 2. Remove offset by subtracting the mean of the samples during absorption. 3. Measure angle between the two states. RAW SIGNAL SYNCHRONIZED OFFSET REMOVED. Implementation. OOT GNURadio modules communicate with python server over UDP.
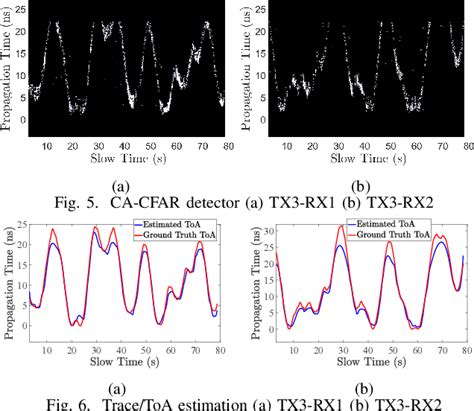
The tracking framework consists of six steps, including clutter reduction, range–Doppler (RD) calculation, target detection, measurement estimation, target localisation and target tracking. Abstract: Due to its high delay resolution, the ultrawideband (UWB) technique has been widely adopted for fine-grained indoor localization. Instead of active positioning, UWB radar-based passive human tracking is explored using commercial off-the-shelf devices. Two wireless phase acquisition techniques for signals backscattered by RFID tags are presented. • Both techniques simplify the deployment of RFID multistatic systems. • A localization system with centimetric accuracy was developed using the . Associating measurements of the same target from different Tx/Rx combinations (i.e. multi-sensor association), as well as improving the target state estimate over time belongs to the tasks of target tracking. In this chapter, the tracking task is .
UHF RFID tag without requiring a physical connection between the transmitter and the receiver systems. Thus, the phase angle can be comfortably measured in a multistatic, easy to deploy RFID sensor network RFID tracking allows companies to monitor where their assets are, how they’re being used, and their condition. This level of visibility helps businesses make the most of their resources, reducing the need for extra equipment. Lower stock levels and fewer out-of-stock items mean less manufacturing and transport, cutting costs and reducing the .
Abstract RFID has become an enabling technology for IoT implementation. In dynamic RFID scenarios, such as smart shops or industrial surroundings, it is crucial to identify every good, with an applied RFID tag, before it leaves the interrogation area.Passive Unsupervised Localization and Tracking using a Multi-Static UWB Radar Network Abstract: The indoor localization and tracking of objects and humans with high accuracy is becoming increasingly important in a number of applications including healthcare, ambient assistant-living, surveillance, among others. The proposed algorithms to fuse information by multiple nodes show significant gains in terms of targets' localization performance, with up to 35\% for the probability of detection, compared to the baseline with a mono-static setup. 8 pages, 10 figures, 1 table.
1. Divide tag response with samples captured during cw. 2. Remove offset by subtracting the mean of the samples during absorption. 3. Measure angle between the two states. RAW SIGNAL SYNCHRONIZED OFFSET REMOVED. Implementation. OOT GNURadio modules communicate with python server over UDP.The tracking framework consists of six steps, including clutter reduction, range–Doppler (RD) calculation, target detection, measurement estimation, target localisation and target tracking.
![[2306.07740] Multi](/upluds/images/[2306.07740] Multi.jpg)
Abstract: Due to its high delay resolution, the ultrawideband (UWB) technique has been widely adopted for fine-grained indoor localization. Instead of active positioning, UWB radar-based passive human tracking is explored using commercial off-the-shelf devices. Two wireless phase acquisition techniques for signals backscattered by RFID tags are presented. • Both techniques simplify the deployment of RFID multistatic systems. • A localization system with centimetric accuracy was developed using the . Associating measurements of the same target from different Tx/Rx combinations (i.e. multi-sensor association), as well as improving the target state estimate over time belongs to the tasks of target tracking. In this chapter, the tracking task is .
[2306.07740] Multi
UHF RFID tag without requiring a physical connection between the transmitter and the receiver systems. Thus, the phase angle can be comfortably measured in a multistatic, easy to deploy RFID sensor network RFID tracking allows companies to monitor where their assets are, how they’re being used, and their condition. This level of visibility helps businesses make the most of their resources, reducing the need for extra equipment. Lower stock levels and fewer out-of-stock items mean less manufacturing and transport, cutting costs and reducing the .
smart card fuze
Passive Unsupervised Localization and Tracking using a
Click on the Slider Buttons to Enable Disable the Services on the said Card. Enter the Transaction Password to confirm the Enable/Disable.The Services will be Enabled/Disabled Successfully. .
multistatic rfid tracking|[2306.07740] Multi